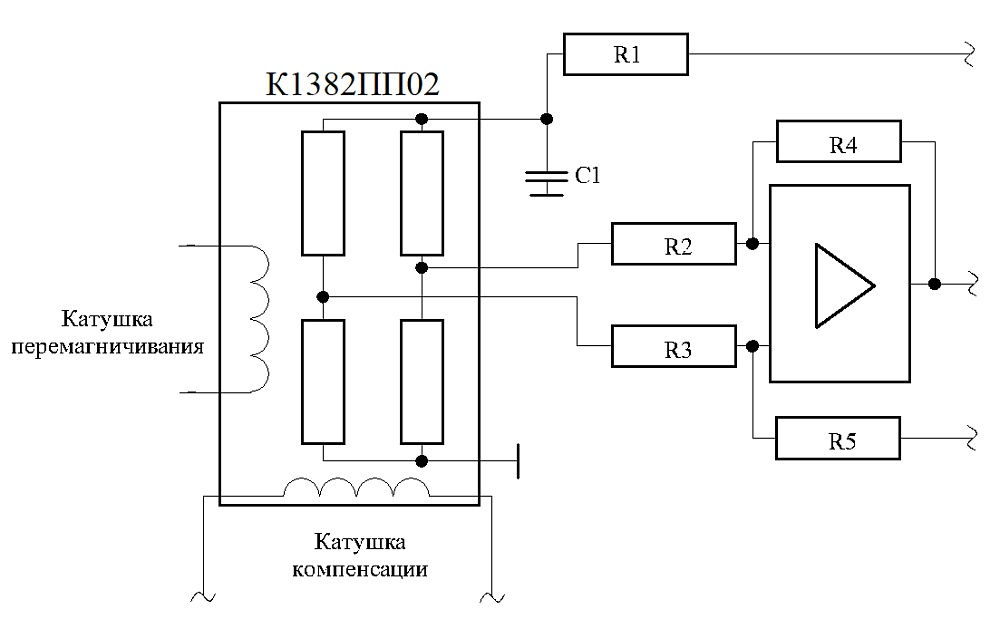
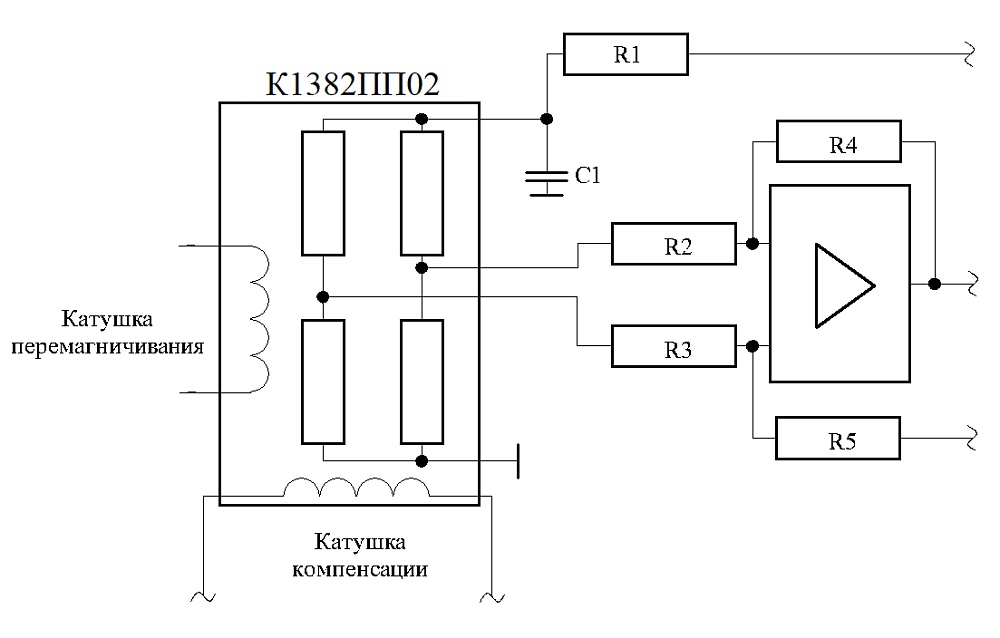
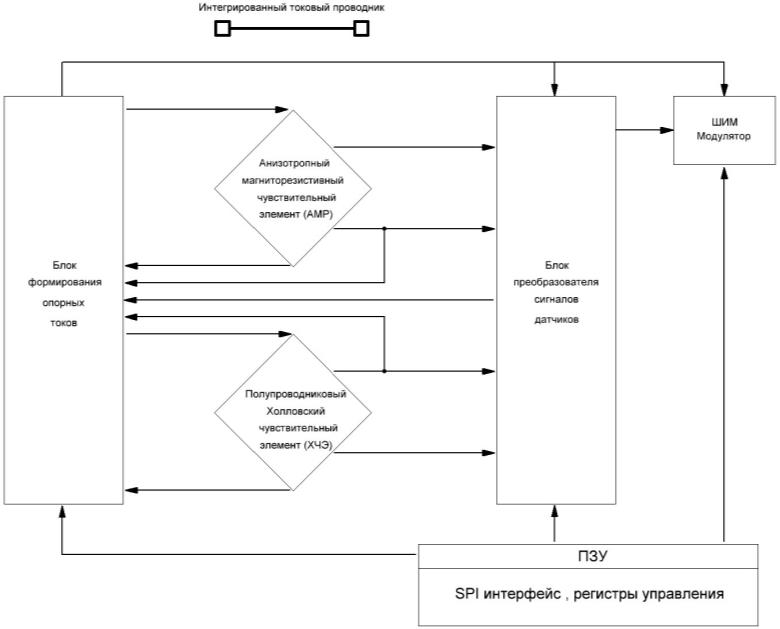
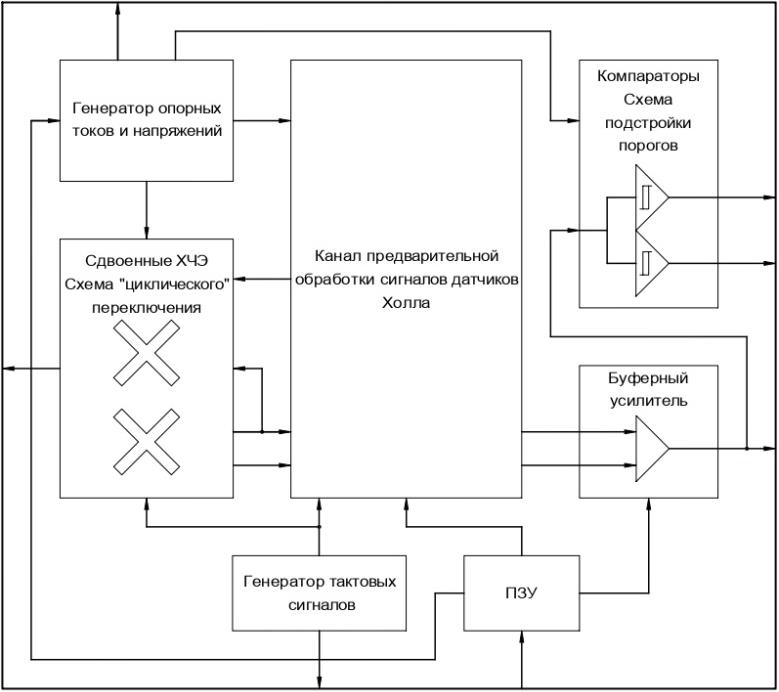
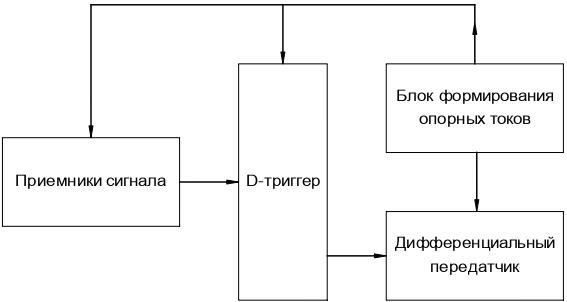
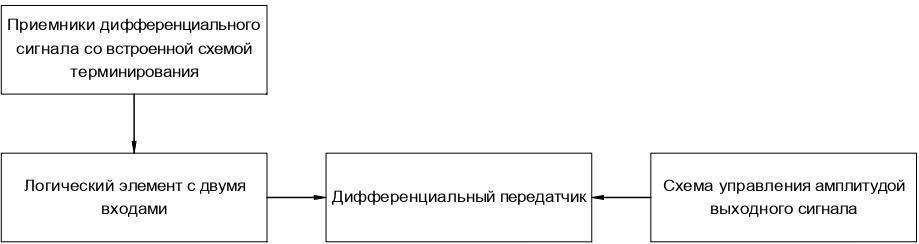
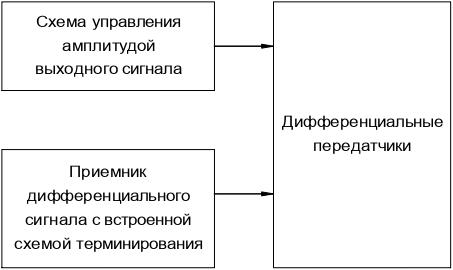
Микросхема содержит приемник
дифференциального сигнала, которые
имеют встроенную схему
терминирования, с возможностью приема
CML сигнала и разветвления входного
сигнала в два канала, а также
дифференциальный передатчик с
возможностью работы в
дифференциальном и потенциальном
режимах и управления амплитудой
выходного сигнала. Схема управления
амплитудой выходного сигнала служит
для формирования сигналов управления
дифференциальных передатчиков.
Область применения
- Широкополосные испытания и измерения;
-
Последовательная передача данных;
-
Буферизация тактовой частоты.
Конкурентные преимущества
- Программируемый дифференциал;
-
Дифференциальная и односторонняя работа;
-
Низкое энергопотребление.